
07/08/2024
Door Ad Spijkers
Er is een nieuwe methode ontwikkeld voor autonome verkenning en coördinatie van meerdere robots in verlaten gebouwen.
Elk jaar veroorzaken naar schatting honderd aardbevingen wereldwijd grote schade, zoals ingestorte gebouwen, neergehaalde elektriciteitskabels en meer. Voor hulpverleners kan het van cruciaal belang maar ook riskant zijn om de situatie te beoordelen en reddingsacties aan te sturen. Onderzoekers van Carnegie Mellon University in Pittsburgh hebben een methode ontwikkeld, die hulpverleners kan helpen informatie te verzamelen en beter geïnformeerde beslissingen te nemen na een ramp.
Maximale inzet
Een belangrijk idee van dit onderzoek was het vermijden van redundantie bij verkenning. Bij verkenning door meerdere zijn coördinatie en communicatie tussen robots van groot belang. De onderzoekers hebben dit systeem zodanig ontworpen dat elke robot verschillende kamers verkent. Hierdoor wordt het aantal kamers dat een bepaald aantal drones kan verkennen, gemaximaliseerd.
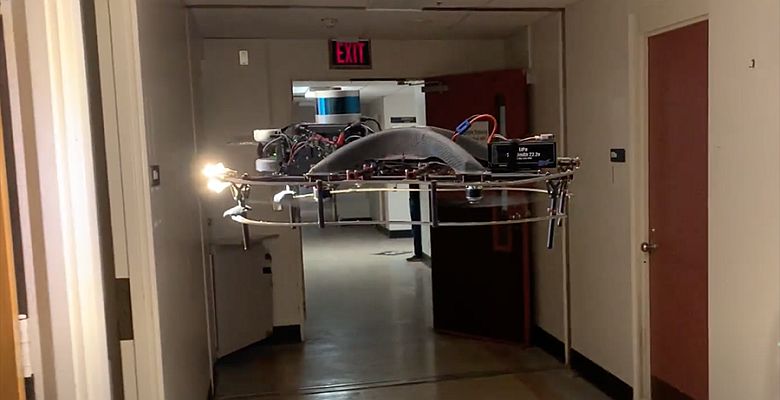
De drones richten zich op het snel detecteren van deuren, omdat zinvolle doelen, zoals mensen, zich eerder in kamers bevinden dan in gangen. Om deze ingangen gericht te vinden, bepalen de robots de geometrische eigenschappen van hun omgeving met behulp van een ingebouwde lidarsensor. De vliegende robots zweven zachtjes ongeveer 2 m boven de vloer en transformeren de 3D lidar-puntenwolkgegevens in een 2D-kaart.
Deze kaart biedt de indeling van de ruimte als een afbeelding die is samengesteld uit cellen of pixels. De robots analyseren deze vervolgens op structurele aanwijzingen die deuren en kamers aangeven. Muren verschijnen als bezette pixels dicht bij de drone, terwijl een open deur of doorgang zich presenteert als lege pixels. Onderzoekers modelleerden de deuren als zadelpunten, waardoor de robot doorgangen kan identificeren en er snel doorheen kan gaan. Wanneer een robot een kamer binnenkomt, verschijnt deze als een cirkel.
Lidar en geen camera
Er waren twee belangrijke redenen om te kiezen voor een lidarsensor in plaats van een camera. Ten eerste gebruikt de sensor minder computerkracht dan een camera. Ten tweede kunnen de omstandigheden in een ingestort gebouw of op de plaats van een natuurramp stoffig of rokerig zijn, wat het zicht van een traditionele camera zou belemmeren.
Er is geen centrale basis die de robots bestuurt. In plaats daarvan neemt elke robot zelf beslissingen en bepaalt optimale trajecten op basis van zijn begrip van de omgeving en communicatie met de andere robots. De luchtrobots delen de lijst met deuren en kamers die ze hebben verkend met elkaar en gebruiken deze informatie om gebieden te vermijden die al zijn bezocht.
Foto: Carnegie Mellon University