
22/08/2022
Door Ad Spijkers
Amerikaanse onderzoekers hebben een manier ontwikkeld waarmee extraplanetaire rovers niet-visuele informatie kunnen gebruiken om over verraderlijk terrein te rijden.
Wanneer visuele gegevens beschikbaar zijn, is het huidige visuele navigatiesysteem van de rovers 'bijna perfect' (99% succespercentage). Maar visuele navigatie werkt alleen als er voldoende objecten in de omgeving zijn. Een vlak landschap bezorgt een rover problemen als hij vertrouwt op zicht om zich te verplaatsen. Omgevingen zoals woestijnen, oceanen of toendra's komen voor op Mars, maar ook op de maan van de aarde en mogelijk op Europa, dat door de aanwezigheid van ijs stof biedt voor wetenschappelijke speculaties over bewoonbaarheid.
Ook duisternis en extreme helderheid maken het moeilijk voor Marsrovers om visuele gegevens te gebruiken voor navigatie. Met hun onderzoek willen wetenschappers van de West Virginia University verliezen zoals die van de Mars-verkenningsrover Spirit voorkomen. Dit voertuig stopte met communiceren nadat zijn wielen in 2010 vast kwamen te zitten in onzichtbaar stuifzand.
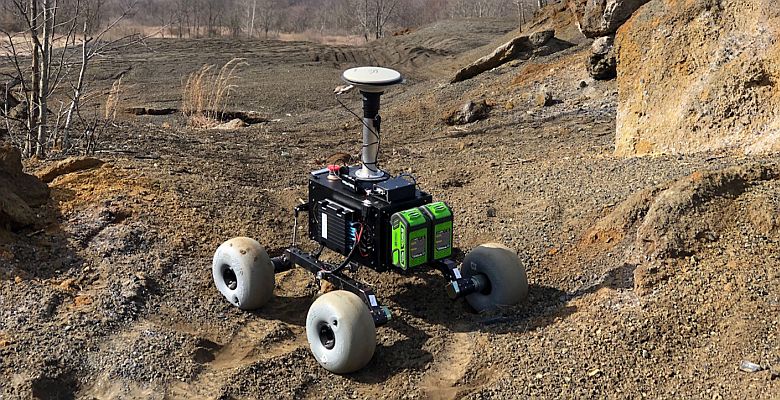
Testen
De Pathfinder van de universiteit is een lichtgewicht kleinschalig testvoertuig. Het werk van de onderzoekers richt zich op het helpen van de rover in situaties waar aspecten van het fysieke terrein moeilijk te lezen zijn op basis van een visuele inspectie. Voorbeelden zijn steile hellingen, los puin, verschillende zandlagen, zachte grond of zoutvlakten zoals die van Europa, de maan van Jupiter.
De onderzoekers testen algoritmen waarmee ze de koers of snelheid kunnen aanpassen zonder gebruik te maken van de camera aan boord. Dat kan bijvoorbeeld op basis van data van instrumenten aan boord zoals versnellingsmeters, gyroscopen , magnetometers en kilometertellers. Die instrumenten vertellen de software over oriëntatie, snelheid en positie, en helpen de rover (en de ingenieurs die hem leiden) de omgeving te begrijpen en erop te reageren.
De rovers kunnen wielslip detecteren met behulp van hun camera's, ze kunnen zien of een wiel op een rots draait, enzovoort. En ze kunnen hun navigatie aanpassen door hun pad te veranderen, individuele wielsnelheden te veranderen of te stoppen om te wachten op het commando van de ingenieurs op aarde.
Algemeen maar specifiek
De onderzoekers proberen de technologie daarom zo algemeen mogelijk te maken voor gebruik in elke robot op elk buitenaards lichaam. Waar een rover ook heen kan in ons zonnestelsel, de algoritmen kunnen hem helpen beschermen tegen een val of beknelling.
Uiteraard moet de software worden afgestemd op een bepaalde rover en zich aanpassen aan de wielafmetingen, de kenmerken van de traagheidsmeeteenheid, maar er zijn geen extra sensoren nodig. Mars heeft prioriteit omdat de bodem van de rode planeet uitdagend is voor begaanbaarheid. Zelfs tijdens een enkele rit doorkruisen Mars-rovers verschillende terreinen met verschillende hellingen.
Om dat doel te realiseren, gaan de onderzoekers aanvullende tests uitvoeren met verschillende rovers. Hun methode heeft al een slipdetectienauwkeurigheid van meer dan 92% voor afstanden van ongeveer 150 m. Ook verbruiken ze minder rekenbronnen dan visueel gebaseerde navigatie. Hierdoor kunnen rovers met deze software sneller reizen en minder vaak stoppen dan wanneer ze vertrouwen op visuele signalen.
De wetenschappelijke publicatie vindt u hier.
Foto: Jonas Bredu