
30/06/2023
Door Ad Spijkers
ANT Everywhere maakt taken van autonome voertuigen buiten net zo robuust en nauwkeurig als binnen.
BlueBotics in St. Sulpice (bij Lausanne) heeft ANT Everywhere gelanceerd als productuitbreiding voor zijn beproefde navigatieproducten. De specialist in navigatie van autonome voertuigen verbreedt hiermee de reikwijdte van AGV- en AMR-taken door ook bewegingen buiten mogelijk te maken. Gebruik buitenshuis is van oudsher een uitdaging voor producenten van autonome voertuigen. Meestal zijn er buiten weinig permanente herkenningspunten op basis waarvan mobiele robots hun exacte positie kunnen berekenen.
Tot nu toe hebben voertuigproducenten deze uitdaging aangepakt door add-ons voor ad-hoc navigatie te gebruiken, zoals het patchen van een GPS-systeem bovenop een bestaand navigatieproduct. Of ze voegen extra buiteninfrastructuur toe, zoals op maat gemaakte palen met reflectoren. Buiteninstallaties van AGV's en AMR's zijn vaak op maat gemaakt (en dus duur) en complexer en tijdrovender om te installeren dan vergelijkbare binnenprojecten.
Geïntegreerde oplossing
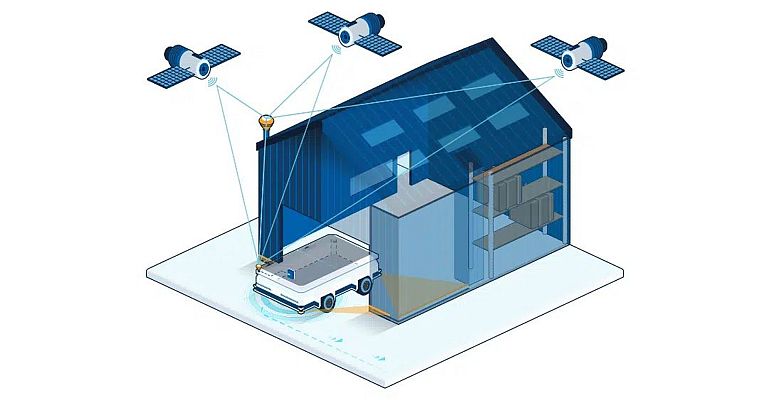
Het bestaande ANT navigatiesysteem van de Zwitsers overwint deze uitdaging door een extra gegevensbron voor navigatie toe te voegen: Global Navigation Satellite System (GNSS) met real-time kinematic (RTK) positionering. Het resultaat is een navigatiesysteem dat AGV- en AMR-operaties buitenshuis net zo robuust en nauwkeurig maakt als binnenshuis. Dook deze nauw geïntegreerde productuitbreiding kunnen voertuigfabrikanten nieuwe en robuuste door ANT aangestuurde voertuigen aan bieden die nauwkeurig zijn, snel te installeren en presteren zoals verwacht, ongeacht de omgeving.
Wanneer een door ANT aangestuurd voertuig is ingeschakeld met ANT Everywhere gebruikt het navigatiealgoritme de gegevensbron die op dat moment het meest relevant is. Binnen een gebouw gebruikt ANT-navigatie de gebruikelijke odometrie, traagheidsmeeteenheid (gyroscoop) en laserscannergegevens om de exacte positie van een voertuig te berekenen. Permanente kenmerken in de omgeving worden vergeleken met die in het geheugen van het voertuig ingebouwde plattegrond.
Bij overgang naar buiten, als minder functies zichtbaar zijn, beginnen GNSS-data ANT te voorzien van aanvullende positioneringsinformatie. Volledig buiten, met minder of geen permanente kenmerken zichtbaar, krijgen GNSS-data een nog hogere prioriteit. Dankzij de geavanceerde sensorfusie van BlueBotics is de overgang tussen binnen en buiten naadloos.
Eerste installatie
Een voertuig met ANT Everywhere voltooide onlangs een succesvolle 'proof of concept' op Barcelona Airport. Het project was onderdeel van een gezamenlijk initiatief van Worldwide Flight Services en de Spaanse luchthavenexploitant AENA. De drie maanden durende test is opgezet om het gebruik van autonome technologie op Spaanse luchthavens te valideren. Er werd vracht van Qatar Airways vervoerd tussen het vrachtmagazijn van Qatar en BCN Terminal 1, met een totale transporttijd van 20 minuten.
Het gebruikte voertuig was een 25-tons Simai trekker AGV van de Spaanse producent Movvo. Volgens dit bedrijf zijn klanten uit veel andere industrieën geïnteresseerd in deze technologie. Bij veel organisaties bestaan processen uit het in- en uitgaan van goederen naar en van magazijnen.
BlueBotics voorziet dat ANT overal het potentieel heeft om een volgende stap te realiseren in AGV- en AMR-bewegingen. Het bedrijf wil het voor voertuigproducenten gemakkelijker maken om AGV's en AMR's te ontwikkelen en te installeren die betrouwbaar en nauwkeurig kunnen bewegen tussen binnen- en buitenomgevingen. Hierdoor kunnen voertuigfabrikanten hun bereik vergroten door te voldoen aan de behoeften van bedrijven. Die zijn te vinden in tal van sectoren, variërend van staal-, aluminium- en bandenproductie tot luchthavens, lucht- en ruimtevaart, landbouw, hout, papier en nog veel meer.
Ill.: BlueBotics