
07/03/2024
Door Ad Spijkers
Als onderdeel van een onderzoeksproject heeft Fraunhofer IZM een compacte en lichtgewicht navigatie-eenheid (IMU) voor drones ontwikkeld.
UAV's (Unmanned Aerial Vehicles ofwel drones) worden onder meer ingezet voor het fotogrammetrische onderzoek van gebouwen en terreintopografieën of als vrachtdrones. Daarvoor zijn toestellen met een zo laag mogelijk gewicht en tegelijkertijd een hoog laadvermogen vereist. Als onderdeel van een onderzoeksproject heeft het Fraunhofer-Institut für Zuverlässigkeit und Mikrointegration (IZM) in Berlijn voor deze drones een compacte en lichtgewicht navigatie-eenheid (IMU) ontwikkeld. De eenheid maakt nauwkeurigheid tot op de centimeter mogelijk, een precisie die voor civiel gebruik nog nooit is bereikt.
Meeteenheid
Doel van het onderzoeksproject IMUcompact was het ontwikkelen van een meetunit voor de nauwkeurige positionering van autonome dronesystemen. De Inertial Measurement Unit (kortweg IMU) van het systeem is in wezen gebaseerd op drie gyroscoopassen en drie versnellingssensoren. Ze moeten kunnen worden gebruikt voor positionering ten behoeve van navigatie en terreinmetingen zonder GPS-signaal.
Compacte gyroscopen met een lage resolutie zitten in alle smartphones en smartwatches, bijvoorbeeld om de oriëntatie van het scherm of de camera te garanderen. Ze zijn klein en licht, maar voor gebruik in drones zijn ze gevoeliger voor omgevingsinvloeden zoals temperatuur, vochtigheid en elektromagnetische velden. IMU-systemen met een hogere resolutie waren oor hun omvang en kosten niet levensvatbaar voor de industrie of het bedrijfsleven.
De interferometrische glasvezel miniatuurgyroscoop (IFOG) die is ontwikkeld door Fraunhofer IZM maakt een hoger detailniveau mogelijk. Het apparaat kan door zijn compactheid en lage massa worden gecombineerd met een grote verscheidenheid aan drones. Omdat deze vorm van gyroscoop geen bewegende delen bevat en elektromagnetisch ongevoelig is, is deze veel geschikter voor gebruik in drones dan traditionele MEMS-alternatieven.
Miniaturisatie
De elektronische en optische componenten van de IMU worden geplaatst met behulp van een nieuw ontwikkelde assemblagemethode Ze kunnen zo worden gerangschikt dat een hoge mate van miniaturisatie wordt bereikt zonder dat dit ten koste gaat van de nauwkeurigheid. Conventionele IMU's hebben een resolutie in het bereik van 25-30 cm. De bij Fraunhofer IZM ontwikkelde gyroscoop maakt nu een absolute nauwkeurigheid van beter dan 10 cm mogelijk.
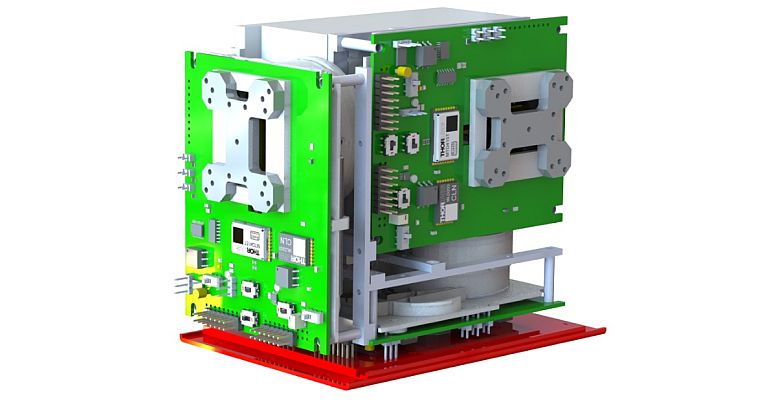
De speciale opstelling van de meetcomponenten op een 3D-geprinte optische bank maakt ook een hoge mechanische sterkte mogelijk voor industriële toepassingen met een laag gewicht. Daarnaast is er een toepassing-specifieke printplaat ontwikkeld die door zijn ontwerp robuust en tegelijkertijd compact is.
Fotogrammetrische metingen
Een van de eerste praktische toepassingen van de nieuwe IMU is fotogrammetrie met UAV's. Fotogrammetrie is het meten en identificeren van fysieke objecten met behulp van de combinatie van 2D-beelden en 3D-meetmethoden zoals Lidar. In dit geval mag het gewicht van de IMU niet meer dan 1 kg bedragen. Het gehele meetsysteem inclusief IMU, Lidar, camera's, datalogger PC en batterijen mag minder dan 5 kg wegen.
Mogelijke toepassingen voor op drones gebaseerde fotogrammetrie zijn onder meer het geautomatiseerd meten van fabrieksgebouwen, het technisch bewaken van offshore windturbines of het geautomatiseerd inventariseren in de landbouw en veehouderij. Op drones gebaseerde fotogrammetrie kan ook een bijdrage leveren aan het vaststellen van schade in rampgebieden, vooral wanneer grote gebieden worden getroffen door onverwachte milieugebeurtenissen. Aanbieders van online kaartdiensten maken ook gebruik van fotogrammetrische processen om digitaal 3D-kaartmateriaal te creëren, hoewel dit vaak kostbaar gebruik van vliegtuigen of gyrocopters met de juiste meettechnologie vereist.
Samenwerking
Fraunhofer IZM kon samen met projectpartners een demonstrator ontwikkelen waarin de IMU werd gecombineerd met een GPS-systeem. Samen met een krachtig geïntegreerd circuit leidde dit tot een complete, geïntegreerde oplossing. Het prototype zal in een volgende stap worden geoptimaliseerd om het civiele gebruik van autonome dronesystemen verder te bevorderen. Het is ook denkbaar om het te gebruiken in andere transportsystemen zoals schepen, ruimtevaart, autonome voertuigen en zelfs op AI gebaseerde logistieke netwerken die een hogere mate van automatisering mogelijk maken.
Behalve Fraunhofer IZM waren IGI – Ingenieur-Gesellschaft für Interfaces in Kreuztal (80 km oostelijk van Keulen), IntraNav in Eschborn (bij Frankfurt am Main) en Milan Geoservice in Spremberg (20 km ten zuiden van Cottbus) bij het IMUcompact-project betrokken.
Foto: Fraunhofer IZM