
13/09/2023
Door Ad Spijkers
In het onderzoeksproject Triple-nanoAUV 2 wordt een miniatuur autonoom vaartuig ontwikkeld voor technologiemissies onder het ijs.
Jarenlang hebben wetenschappers aangenomen dat er zich oceanen van water bevinden onder de ijskappen op de manen Enceladus (bij Saturnus) en Europa (bij Jupiter). Zelfs in de ruimte kan de aanwezigheid van water de mogelijkheid van leven suggereren, zelfs als het zich onder een ijslaag bevindt.
Het onderzoek naar dergelijke waterlichamen die kilometers onder een ijskap op aarde liggen, is al een enorme uitdaging, en in de ruimte nog meer. Hoe kunnen technologische hulpmiddelen door de dikke ijskorst dringen en hoe kan de verkenning van de onderliggende oceaan worden uitgevoerd onder de extreme omgevingsomstandigheden die daar bestaan? Welke soorten wetenschappelijke sensoren zijn nodig bij de zoektocht naar tekenen van leven daar? Hoe kunnen monsters worden opgehaald? Hoe kan dit allemaal worden bereikt zonder een nog onbekend ecosysteem te besmetten?
Triple
Het doel van het samenwerkingsproject Triple-nanoAUV 2 is voornamelijk om de technologische uitdagingen aan te pakken. Triple staat voor 'Technologies for Rapid Ice Penetration and subglacial Lake Exploration'. Het samenwerkingsproject wordt gecoördineerd door het Zentrum für Marine Umweltwissenschaften (Marum) van de Universität Bremen. Andere partners zijn DSI Aerospace Technologie in Bremen en EvoLogics in Berlijn.
Samen met de samenwerkingsprojecten Triple-GNC en Triple-LifeDetect maakt het project deel uit van de DLR Explorer-initiatieven. De ontwikkelingen in de Triple-projecten zullen in fase twee worden gecombineerd en gezamenlijk worden getest tijdens een veldproef onder de Antarctische ijsplaat nabij het Neumayer III Station in het voorjaar van 2026.
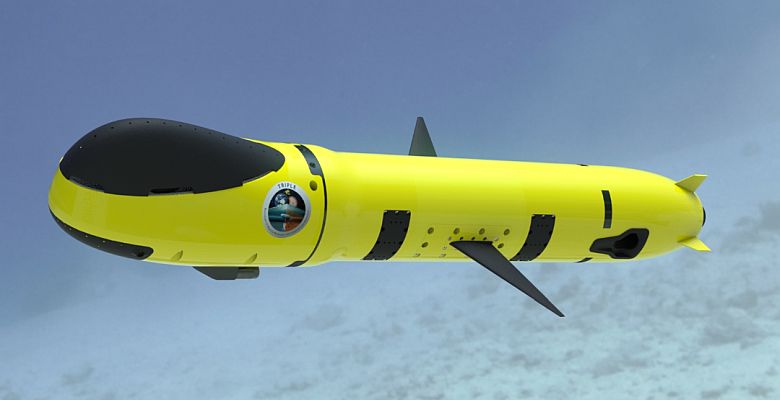
In samenwerking met industriële partners uit de ruimtevaart zullen bij Marum een klein Autonomous Underwater Vehicle (AUV) en een LRS (Launch and Recovery System) worden. Dankzij de LRS kan de nanoAUV aanmeren bij een onderwaterstation om de verzamelde data te verzenden en de batterijen op te laden, waardoor hij langer onder water kan blijven. Omdat het vaartuig als lading binnen een smeltsonde door het ijs moet worden getransporteerd, zal het veel kleiner zijn dan gebruikelijk is voor onderwatervaartuigen. Het zal een diameter hebben van ongeveer 10 cm en een lengte van ongeveer 50 cm.
Onbekende ecosystemen
Er wordt aangenomen dat er onbekende ecosystemen zijn in de subglaciale meren onder het continentale ijs van Antarctica. Technologisch gezien is het onderzoeken van het waterlichaam, dat bedekt is met wel 4.000 m ijs, uiterst veeleisend. Nanovaartuigen kunnen bijdragen aan een beter algemeen begrip van mariene ecosystemen. Het nieuwe autonome systeem zou het in de toekomst mogelijk moeten maken om de mondiale oceaan van vloeibaar water onder de ijskoude oppervlakken van de manen Europa en Enceladus te bestuderen. Miniaturisering is de belangrijkste uitdaging bij de ontwikkeling ervan, waarbij de sonde de totale omvang dicteert. Bovendien moeten alle onderdelen bestand zijn tegen de hoge druk onder water.
Het doel is om binnen de DLR Explorer-initiatieven expertise te vergaren die kan worden gebruikt bij een mogelijke internationale ruimtemissie. Bij de eerste veldtesten zal de smeltsonde worden ingezet met de nanoAUV geïntegreerd als lading in ijs met een dikte van 100 m. Bovendien is de nanoAUV onderbekrachtigd in vergelijking met grotere autonome vaartuigen, wat betekent dat hij beperkt manoeuvreerbaar is. Dit vereist een extreem hoge betrouwbaarheid en nauwe coördinatie tussen de medewerkers van Triple-GNC en Triple-LifeDetect.
Voortgang
Het project is een vervolg op de samenwerkingsprojecten Triple-nanoAUV1 en Triple-MoDo. Het bouwt voort op ontwikkelingsconcepten voor het autonome vaartuig en een docking station. In het parallelle project Triple-IceCraft is de smeltsonde al ontwikkeld. Deze zal de ijsbedekking bij Neumayer III binnendringen en de nanoAUV in het onderliggende water afleveren. Andere gerelateerde projecten ontwikkelen onder meer de navigatiesoftware en wetenschappelijke payload voor het autonome vaartuig. Dit is de eerste keer dat ruimte- en diepzeeonderzoek worden gecombineerd en robotsystemen worden ontwikkeld voor extreme omgevingen.
Foto: Marum, Universität Bremen