
25/10/2022
Door Ad Spijkers
Koreaanse wetenschappers ontwikkelen een grijper die de slurf van een olifant nabootst om tegelijkertijd te knijpen en vast te hechten aan objecten.
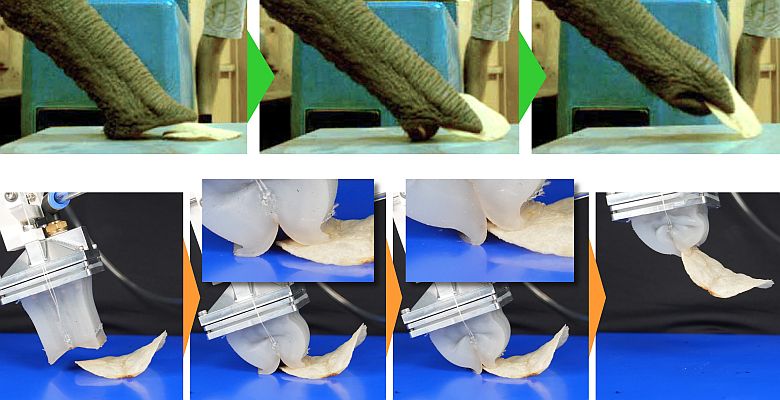
Het Korea Institute of Machinery and Materials (KIMM) in Deajeon (centraal Zuid-Korea) heeft een grijprobot ontwikkeld die alle soorten voorwerpen kan grijpen. Dat varieert van fijne of dunne voorwerpen zoals acupunctuurnaalden en naalden tot grote voorwerpen zoals dozen. Volgens de onderzoekers is het de eerste grijper die alle grijpbewegingen kan maken, geïnspireerd door de slurf van een olifant. De grijper bootst met name na hoe olifanten kleine voorwerpen oppakken door ze met de punt van hun slurf te knijpen of de grote voorwerpen vastgrijpen door lucht diep door hun slurf naar binnen te zuigen.
Opbouw
De grijper kan objecten vastgrijpen met een knijp-zuig-fusiemechanisme met behulp van zijn structuur: een rekbare dunne wand en draden waarmee de grijper van vorm kan veranderen. Het team verwacht dat deze nieuwe technologie op verschillende gebieden toepasbaar zal zijn. Het kan niet alleen objecten van verschillende grootte effectief transporteren, maar ook objecten op een stabiele manier vastpakken en monteren, en dat zonder gebruik van ingewikkelde mechanische apparaten of sensoren.
De zachte structuur van de grijper heeft verschillende microkanalen die binnenin een vacuüm creëren, waardoor de grijper zich aan een object kan hechten. Omdat elk van deze microkanalen flexibel is, kan de 'slurf' zijn vorm aanpassen aan de objecten waarmee het in contact komt. Daarom functioneert de zachte structuur zelf als een zuiggrijper door kleefkracht op het oppervlak van objecten te genereren.
Bovendien kan de grijper trekken aan de draden die de vorm van de grijper bepalen en die zich in het midden van de zachte structuur bevinden. De grijper kan zichzelf dubbelvouwen, waardoor hij kan worden gebruikt als een klauwgrijper, waarbij de voorwerpen worden vastgeklemd en vastgepakt. . Op deze manier wikkelt de rekbare dunne wand buiten de grijper zich om het doelobject en sluit het af. Door een vacuüm in de grijper te creëren na het knijpen en wikkelen rond het object, kan de grijpkracht indien nodig aanzienlijk worden verhoogd.
Gebruik
In de loop der jaren zijn grijpers afzonderlijk ontwikkeld als klauwtype of zuigtype. Klauwende grijpers kunnen geen objecten oppakken die groter zijn dan de maximale grootte waarmee de klauw kan worden geopend. Zuigende grijpers nemen voorwerpen van verschillende afmetingen op maar hebben moeite met het vastpakken van zeer dunne voorwerpen zoals naalden of draad. Ook hebben ze moeite met of voorwerpen waar de lucht doorheen kan, zoals een doek of spons.
De door KIMM ontwikkelde grijper kan objecten van verschillende afmetingen en materialen vastgrijpen door gelijktijdig de grijpmechanismen van het klauw- en zuigtype toe te passen. De grijper kan niet alleen kleine voorwerpen zoals acupunctuurnaalden (0,25 mm diameter) van de vloer vast pakken, voorwerpen die kleiner zijn dan een honderdste van de grijper. Maar hij kan ook grote voorwerpen vastgrijpen, zoals dozen die tien keer zo groot zijn.
De grijper kan ook verschillende objecten in de klauwgrijpmodus knijpen en grijpen door eenvoudig de pneumatische cilinder in en uit te schakelen die de vormmodificerende draden beweegt, zonder ingewikkelde sensoren of bedieningselementen. De grijper van KIMM kan zelfs complexe taken uitvoeren, zoals een pop in een geschenkdoos verpakken, een papieren caketopping op een cake plaatsen en stabiel lucifers op de grond te houden om kaarsen aan te steken . De grijper kan zelfs bloemen schikken door de stelen vast te pakken van verschillende bloemen met atypische vormen die op de grond liggen.
Veiligheid
De nieuw ontwikkelde slurfgrijper is zacht, dus er is geen risico op letsel, zelfs in de buurt van mensen. Hij kan niet alleen objecten van verschillende afmetingen aan, van fijne onderdelen tot dozen, zonder complexe mechanische structuren of sensoren, maar het kan ook gemakkelijk worden gehanteerd. Volgens de onderzoekers betekent dit dat hij kan worden toegepast in verschillende industrieën en in het dagelijks leven. Ze verwachten dat de grijper een grote hulp zal zijn voor de ontwikkeling van servicerobots in het dagelijks leven en bedrijven die een verscheidenheid aan verschillende objecten produceren.
Foto: Korea Institute of Machinery and Materials (KIMM)