
18/07/2022
Door Ad Spijkers
Onderzoekers van MPI-IS in Stuttgart ontwikkelden een robothond waarvan het virtueel ruggenmerg continu wordt geoptimaliseerd.
Een pasgeboren giraf of veulen moet na de geboorte eerst leren zijn poten te gebruiken. Alle ingrediënten zijn aanwezig, maar de coördinatie om alle spieren en pezen te gebruiken komt pas met de tijd. Nauwkeurige spiercontrole moet worden geoefend; totdat op een gegeven moment het zenuwstelsel in het ruggenmerg goed is aangepast. Pas dan kan een jong dier volwassen soortgenoten bijhouden. Wetenschappers onderzochten van het Max Planck Institut bouwden een robot die reflexen heeft als een dier en leert van fouten.
Leeralgoritme
Wanneer hij voor het eerst begint te lopen, leert de robot van het Max Planck Institut für Intelligente Systeme (MPI-IS) in Stuttgart in slechts een uur om zijn interne mechanica zo goed mogelijk te gebruiken. Dit werkt met een Bayesiaans optimalisatie-leeralgoritme: Sensorinformatie van de voeten (de actuele data) wordt vergeleken met de doeldata van de computer. De robot leert lopen door de structuur van de bewegingspatronen van deze data continu aan te passen.
Het leeralgoritme beïnvloedt een zogenaamde Central Pattern Generator (CPG). Bij mens en dier zijn deze centrale patroongeneratoren netwerken van zenuwcellen in het ruggenmerg. Deze veroorzaken ritmische spiersamentrekkingen, onafhankelijk en zonder invloed van de hersenen. Deze neurale netwerken spelen een belangrijke rol bij continue bewegingen zoals lopen, knipperen of de spijsvertering.
Bij pasgeboren dieren is goed zichtbaar dat de CPG's niet precies genoeg zijn ingesteld. Zolang een jong dier op een vlak oppervlak loopt, regelen de CPG's de bewegingssignalen van het ruggenmerg correct. Bij een kleine oneffenheid treden reflexen in die bewegingspatronen aan passen om te voorkomen dat het dier valt.
Deze bewegingssignalen zijn omkeerbaar, of 'elastisch': de bewegingspatronen keren na de verstoring terug naar hun oorspronkelijke configuratie. Als het dier ondanks actieve reflexen over vele bewegingscycli niet stopt met struikelen, moeten de bewegingspatronen opnieuw en onomkeerbaar ofwel 'plastisch' worden aangeleerd.
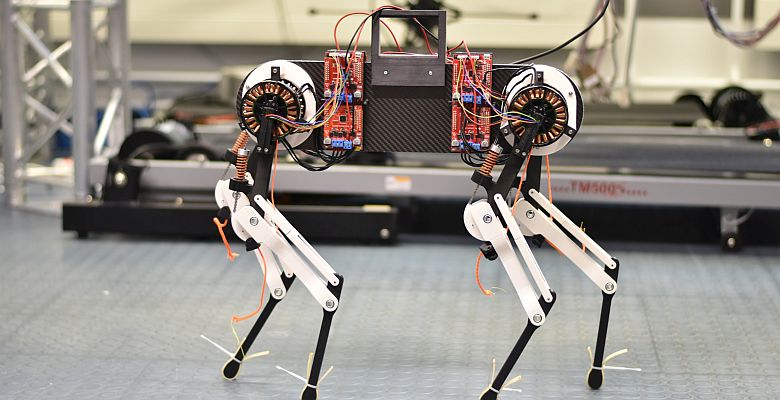
Robothond
Hetzelfde geldt voor de robothond ter grootte van een labrador. 'Morti' optimaliseert zijn bewegingspatronen echter veel sneller, namelijk in ongeveer een uur. Zijn CPG wordt gesimuleerd in een kleine lichte computer.
In het uur dat de robot nodig heeft om soepel te lopen, worden de gegevens van de sensoren die aan de voeten zijn bevestigd continu vergeleken met de CPG-signalen. Als de robot struikelt, verandert het leeralgoritme hoe ver de benen heen en weer zwaaien, hoe snel ze zwaaien en hoe lang een been op de grond blijft. Aangepaste beenbewegingen beïnvloeden hoe goed of slecht de robot zijn mechanica kan gebruiken. De CPG zendt aangepaste signalen uit zodat de robot voortaan zo min mogelijk struikelt en zo zijn lopen optimaliseert.
De CPG werkt als een ingebouwde automatische loopintelligentie zoals een mens en dier heeft. De onderzoekers hebben dit overgedragen aan de robothond. De computer produceert signalen die naar de benen gaan. Als de robot loopt en struikelt, vloeit deze data terug uit de sensoren en wordt verwerkt door de computer die de bewegingspatronen genereert. Als de gegevens niet aan de specificaties voldoen, veranderen de onderzoekers het loopgedrag totdat lopen zonder struikelen werkt.
Zuinig met energie
De computer verbruikt slechts 5 W aan energie. Robotconstructies van bekende fabrikanten verbruiken meestal tientallen tot enkele honderden Watts aan elektriciteit. Beide systemen werken dynamisch en efficiënt, maar het energieverbruik van het model van MPI-IS is veel lager. Het geeft ook belangrijke inzichten in de anatomie van dieren.
De onderzoekers kunnen het ruggenmerg van een levend dier niet bestuderen. Maar ze kunnen het wel in de robot modelleren. Ze weten dat deze CPG's bij dieren voorkomen en dat er reflexen zijn. Maar hoe zijn beide te combineren zodat dieren bewegingen kunnen leren met de reflexen en de CPG's? Dit is fundamenteel onderzoek op het snijvlak van robotica en biologie. Het robotmodel geeft antwoorden op vragen die de biologie alleen niet kan beantwoorden.
Foto: Felix Ruppert, MPI-IS