
29/12/2021
Door Ad Spijkers
Machine learning helpt bij lokaliseren en verzamelen van afval.
Er bevindt zich naar schatting momenteel tussen 26 en 66 miljoen ton kunststof afval in onze zeeën en oceanen. Het meeste bevindt zich op de oceaanbodem. Dit is een grote bedreiging voor het ecologische evenwicht van de oceanen en voor de planten en dieren die in zee leven.
Het verzamelen van afval in de oceanen en zeeën is complex en duur. Het is ook vaak gevaarlijk omdat er meestal duikers moeten worden ingezet. Daarnaast richten schoonmaakacties zich vooral op het wateroppervlak.
Een team van de Technische Universität München (TUM) werkt samen met acht Europese partnerinstituten (waaronder de TU Delft) om hier wat aan te doen. In het SeaClear-project ontwikkelten wetenschappers een robotsysteem dat onder water afval kan lokaliseren en verzamelen. Hierbij worden machine learning methoden gebruikt.
Samenwerkende robots
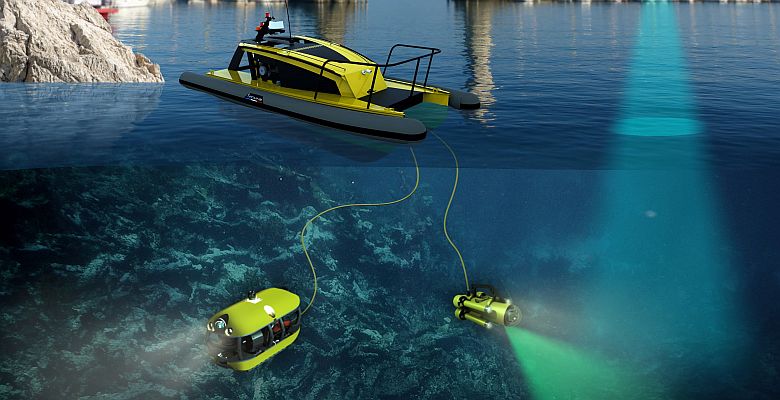
Het systeem omvat uit vier robotcomponenten. Een autonoom varende robotboot voert een eerste scan van de zeebodem uit en lokaliseert grotere ophopingen van afval. Vervolgens wordt een observatierobot in het water neergelaten, die het afval in de diepte opspoort en tegelijkertijd de computers voorziet van verdere informatie zoals close-ups van de zeebodem.
Als het water helder is en het zicht goed is, zorgt ook een drone vanuit de lucht er voor dat verdere rommel in het water wordt gedetecteerd. Met behulp van al deze informatie wordt een virtuele kaart gegenereerd. Een verzamelrobot vaart dan door bepaalde punten op de kaart en haalt het afval op. Grotere delen worden met behulp van een grijper afgevoerd in een mand die aan het schip is verbonden.
Uitdaging
Het ontwikkelen van autonome robots voor gebruik onder water vormt een heel speciale uitdaging. In tegenstelling tot op het land zijn er in het water hele bijzondere omstandigheden. Zodra een stuk afval is geïdentificeerd en gelokaliseerd, moet de robot er eerst omheen bewegen. Daarbij kan hij soms sterke stromingen tegenkomen waar hij zich tegen moet verzetten.
Het is de taak van TUM in het SeaClear-project om dit goed te beheersen. Om dit te doen, gebruikt het team machine learning methoden. Kunstmatige intelligentie (AI) berekent en leert wanneer en onder welke omstandigheden de robot op een bepaalde manier beweegt. Op deze manier kunnen nauwkeurige voorspellingen worden gedaan over zijn gedrag.
Een andere uitdaging is dat de applicatie niet de rekenkracht heeft die we op het land gewend zijn. Er is geen verbinding met grote datacenters met high performance computers. De algoritmen die de onderzoekers ontwikkelen, moeten daarom zo efficiënt mogelijk zijn. De wetenschappers werken aan methoden met een hoge 'sampling efficiency' die met zo min mogelijk data de best mogelijke voorspellingen kunnen doen. Informatie die niet nodig is, wordt simpelweg door de AI vergeten.
Voortgang
Zodra het SeaClear-systeem volledig operationeel is, moet het onderwaterafval classificeren met een voorspellingspercentage van 80% en 90% met succes verzamelen. Dat is vergelijkbaar met het succes van duikers. Het robotsysteem is volgens de projectleiding ook 70% goedkoper dan duikers.
De eerste tests met het prototype werden uitgevoerd in oktober 2021 in helder water en goede zichtomstandigheden in de Kroatische stad Dubrovnik. In mei 2022 zouden er verdere proeven moeten plaatsvinden in de haven van Hamburg.
Foto: The SeaClear Project