
16/12/2021
Door Ad Spijkers
Dat neuromorfe robots kunnen leren was al een tijdje bekend. Nu kunnen ze ook autonoom bewegen.
Een doolhof is een populair instrument onder psychologen om het leervermogen van muizen of ratten te testen. Kunnen ook robots leren om zelfstandig de uitgang van een labyrint te vinden? Onderzoekers van de TU Eindhoven en het Max Planck Institut für Polymerforschung in Mainz laten zien dat het kan. Hun neuromorfe robot baseert zijn beslissingen op hetzelfde systeem dat wij mensen gebruiken om te denken en te handelen: ons brein. De studie kan leiden tot nieuwe toepassingen van neuromorfe apparaten in bijvoorbeeld de gezondheidszorg en edge computing.
Neurale netwerken en machine learning kunnen bogen op de nodige successen op het gebied van beeldherkenning, medische diagnose, e-commerce en vele andere gebieden. Toch kleven er ook nadelen aan deze softwarematige benadering van machine-intelligentie; zo is veel energie nodig om algoritmen te trainen.
Menselijk brein als inspiratiebron
Het energieprobleem is een van de redenen waarom onderzoekers hebben geprobeerd computers te ontwikkelen die veel zuiniger zijn. Daarbij laten ze zich inspireren door het menselijk brein. Dit is een denkende machine die door de manier waarop geheugen en verwerking samenwerken weinig energie gebruikt. Hierdoor kunnen mensen dingen onthouden en leren. In hun onderzoek hebben de wetenschappers dit model gebruikt om een robot te ontwikkelen die kan leren bewegen door een labyrint
Net zoals een synaps in een muizenbrein wordt versterkt wanneer het beestje de juiste kant opgaat in een doolhof, wordt het apparaat 'getuned' door een bepaalde hoeveelheid elektriciteit toe te dienen. Door de weerstand in het apparaat te manipuleren, verandert de spanning die de motoren aanstuurt. Die bepalen op hun beurt of de robot naar rechts of naar links draait.
Werking
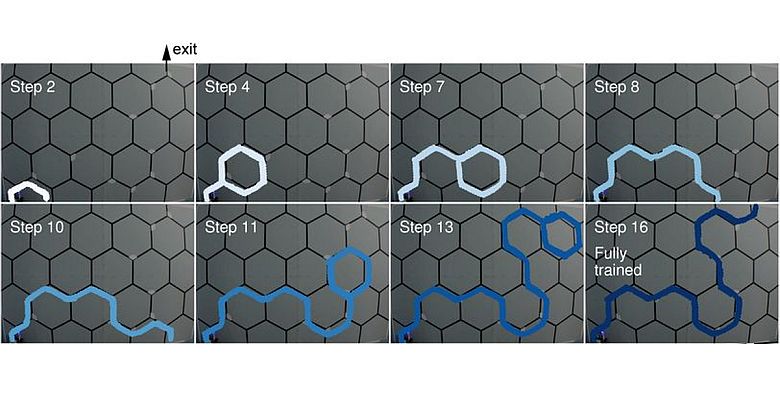
In het onderzoek is gebruik gemaakt van een Mindstorms EV3 robotica-kit van Lego. Met twee wielen, traditionele besturingssoftware om ervoor te zorgen dat hij een lijn kan volgen en een aantal reflectie- en aanraaksensoren werd de robot een 'doolhof' van 2 m x 2 m ingestuurd. Het doolhofmodel bestaat uit zwart omlijnde zeshoeken in een honingraatachtig patroon.
De robot is geprogrammeerd om standaard rechtsaf te slaan. Wanneer hij een doodlopende weg bereikt of afwijkt van het aangegeven pad naar de uitgang (aangegeven door visuele signalen), wordt hem verteld om te keren of naar links te gaan. Deze corrigerende stimulans wordt vervolgens in het neuromorfische apparaat opgeslagen voor de volgende poging.
Uiteindelijk had de robot zestien runs nodig om de uitgang te vinden. Als hij eenmaal deze specifieke route heeft geleerd te volgen, kan hij elk ander pad dat hem wordt opgegeven in één keer kan doorlopen. De kennis die hij heeft opgedaan is generaliseerbaar. Een deel van het succes van de robot ligt in de integratie van sensoren en motoren. Deze integratie waarbij zintuig en beweging elkaar versterken, lijkt erg op hoe de natuur werkt.
Foto: TU Eindhoven