
23/03/2023
Door Ad Spijkers
Amerikaanse onderzoekers hebben een rupsachtige zachte robot gedemonstreerd die vooruit, achteruit en onder nauwe ruimtes kan duiken.
De beweging van een rups wordt gecontroleerd door de lokale kromming van zijn lichaam. Zijn lichaam buigt anders wanneer het zichzelf naar voren trekt dan wanneer het zichzelf naar achteren duwt. Onderzoekers aan de South Carolina State University in Raleigh hebben zich laten inspireren door de biomechanica van de rups om die lokale kromming na te bootsen.
Beweging
Het ontwikkelen van zachte robots die in twee verschillende richtingen kunnen bewegen, is een grote uitdaging. Ze gebruiken nanodraadverwarmers om soortgelijke kromming en beweging in de rupsrobot te beheersen. De rupsrobot wordt voortbewogen door een nieuw patroon van zilveren nanodraden die warmte gebruiken om de manier waarop de robot buigt te regelen, waardoor gebruikers de robot in beide richtingen kunnen sturen.
Door de ingebedde nanodraadverwarmers kunnen de onderzoekers de beweging van de robot op twee manieren regelen. Ze kunnen bepalen welke delen van de robot buigen door het verwarmingspatroon in de zachte robot te regelen. Ook kunnen ze de mate waarin die secties buigen controleren door de hoeveelheid warmte die wordt toegepast te regelen.
Opbouw
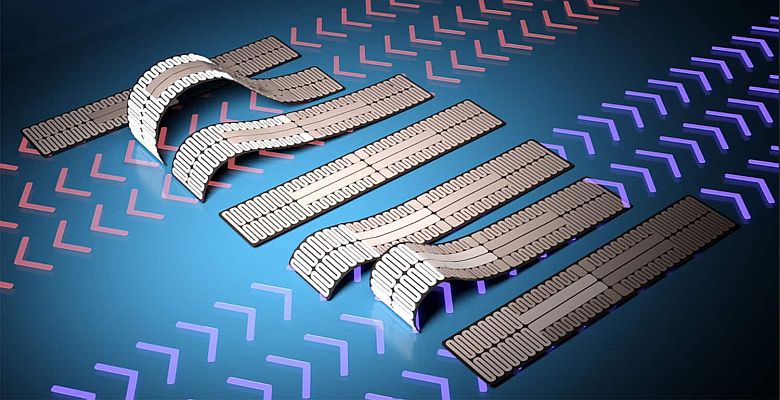
De rupsrobot bestaat uit twee lagen polymeer, die verschillend reageren bij blootstelling aan hitte. De onderste laag krimpt of trekt samen bij blootstelling aan hitte. De bovenste laag zet uit bij blootstelling aan hitte. In de uitzettende laag polymeer is een patroon van zilveren nanodraden ingebed. Het patroon bevat meerdere aansluitpunten waar onderzoekers een elektrische stroom kunnen toepassen. Ze kunnen bepalen welke delen van het nanodraadpatroon opwarmen door een elektrische stroom op verschillende geleidingspunten aan te leggen. Ze kunnen de hoeveelheid warmte regelen door meer of minder stroom toe te passen.
De onderzoekers hebben aangetoond dat de rupsrobot zichzelf naar voren kan trekken en zichzelf naar achteren kan duwen. Over het algemeen geldt dat hoe meer stroom wordt toegepast, des te sneller de robot in beide richtingen zou bewegen. Ze ontdekten echter dat er een optimale cyclus was, waardoor het polymeer de tijd kreeg om af te koelen. Hierdoor kon de 'spier' effectief ontspannen voordat hij weer samentrok. Als de onderzoekers de rupsrobot te snel probeerden te laten bewegen, had het lichaam geen tijd om te 'ontspannen' voordat het weer samentrok, wat zijn beweging belemmerde.”
De onderzoekers toonden ook aan dat de beweging van de robot kon worden gecontroleerd tot het punt waarop gebruikers hem onder een lage opening konden sturen. Dit is vergelijkbaar met het begeleiden van de robot om onder een deur door te glippen. In wezen konden de onderzoekers zowel de voorwaartse als de achterwaartse beweging regelen, evenals hoe hoog de robot op elk moment in dat proces naar boven boog.
Verder onderzoek
Deze benadering van het voortbewegen van een zachte robot is zuinig energie. De onderzoekers zijn geïnteresseerd in het onderzoeken van manieren waarop ze dit proces nog efficiënter kunnen maken. Bijkomende volgende stappen zijn onder meer de integratie van deze benadering van zachte robotbeweging met sensoren of andere technologieën voor gebruik in verschillende toepassingen, zoals zoek- en reddingsapparatuur.
De wetenschappelijke publicatie vindt u hier.
Foto: Shuang Wu, NC State University