
12/04/2023
Door Ad Spijkers
Engelse onderzoekers hebben een goedkope robothand ontworpen die een reeks objecten kan vastgrijpen - en ze niet kan laten vallen.
Het grijpen van objecten van verschillende grootte, vorm en textuur is een probleem dat gemakkelijk is voor een mens, maar uitdagend voor een robot. Onderzoekers van de University of Cambridge ontwierpen een zachte, 3D-geprinte robothand die zijn vingers niet zelfstandig kan bewegen, maar toch een reeks complexe bewegingen kan uitvoeren. De robothand werd getraind om verschillende objecten vast te pakken. Ze kon voorspellen of ze een object zou laten vallen door gebruik te maken van de informatie van sensoren die op haar 'huid' waren geplaatst.
Robothand
Dit type passieve beweging maakt de robot gemakkelijker te besturen en zuiniger om te gaan met energie dan robots met volledig gemotoriseerde vingers. Volgens de onderzoekers kan worden gebruikt bij de ontwikkeling van goedkope robots die meer natuurlijke bewegingen en een breed scala aan objecten kunnen leren begrijpen.
In de natuurlijke wereld is beweging het resultaat van de wisselwerking tussen de hersenen en het lichaam. Hierdoor kunnen mensen en dieren op complexe manieren bewegen zonder onnodige hoeveelheden energie te verbruiken. In de afgelopen jaren zijn zachte componenten geïntegreerd in het ontwerp van robotica dankzij de vooruitgang in 3D-printtechnieken. Hierdoor konden onderzoekers complexiteit toevoegen aan eenvoudige, energie-efficiënte systemen.
De hand is complex; het is een grote uitdaging om al haar behendigheid en aanpassingsvermogen in een robot te recreëren. De hedendaagse meeste geavanceerde robots kunnen niet taken aan die kleine kinderen gemakkelijk kunnen uitvoeren. Mensen weten bijvoorbeeld instinctief hoeveel kracht ze moeten gebruiken bij het oppakken van een ei, maar voor een robot is dit een uitdaging. Bij te veel kracht kan het ei breken, bij te weinig kracht zou de robot het ei kunnen laten vallen. Bovendien vereist een volledig aangedreven robothand, met motoren voor elk gewricht in elke vinger, een aanzienlijke hoeveelheid energie.
Mogelijke oplossingen
In Cambridge hebben onderzoekers mogelijke oplossingen voor beide problemen ontwikkeld. Een robothand kan een verscheidenheid aan objecten met de juiste hoeveelheid druk grijpen terwijl ze een minimale hoeveelheid energie gebruikt. In eerdere experimenten hebben de onderzoekers aangetoond dat het mogelijk is om een aanzienlijk bewegingsbereik in een robothand te krijgen door alleen de pols te bewegen. Ze wilden zien of een robothand op basis van passieve beweging niet alleen objecten kon vastpakken, maar ook kon voorspellen of hij de objecten zou laten vallen of niet, en zich daarop zou aanpassen.
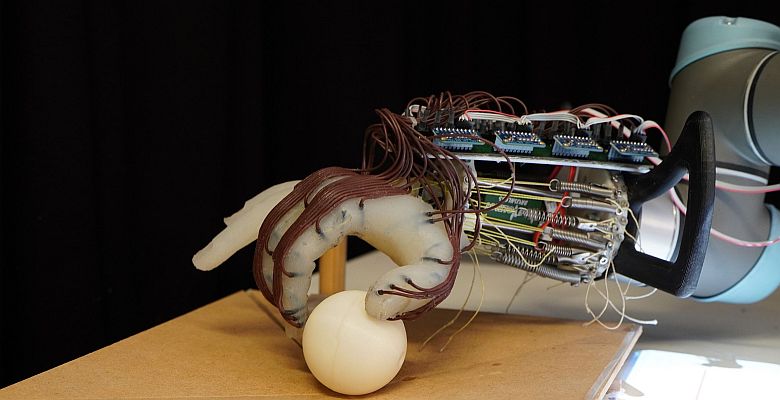
De onderzoekers gebruikten een 3D-geprinte antropomorfe hand waarin tactiele sensoren waren geïmplanteerd, zodat de hand kon voelen wat hij aanraakte. De hand was alleen in staat tot passieve beweging op basis van de pols. Ze voerden meer dan 1200 tests uit met de robothand en observeerde het vermogen om kleine voorwerpen vast te pakken zonder ze te laten vallen.
De robot werd in eerste instantie getraind met behulp van kleine 3D-geprinte plastic ballen. Hij greep ze vast met een vooraf gedefinieerde actie die werd verkregen door menselijke demonstraties. Dit soort hand heeft een beetje veerkracht: het kan dingen uit zichzelf oppakken zonder bediening van de vingers. De tactiele sensoren geven de robot een idee van hoe goed de grip gaat, zodat hij weet wanneer hij begint te slippen. Dit helpt om te voorspellen wanneer dingen zullen mislukken.
Vallen en opstaan
De robot gebruikte vallen en opstaan om te leren wat voor soort grip succesvol zou zijn. Na het beëindigen van de training met de ballen, probeerde de hand vervolgens verschillende objecten vast te pakken, waaronder een perzik, een computermuis en een rol noppenfolie. Bij deze tests kon de hand elf van de veertien objecten met succes vastpakken. De sensoren, die een beetje op de huid van een robot lijken, meten de druk die op het object wordt uitgeoefend.
De onderzoekers kunnen niet precies zeggen welke informatie de robot krijgt, maar theoretisch kan hij inschatten waar het object is gegrepen en met hoeveel kracht. De robot leert dat een combinatie van een bepaalde beweging en een bepaalde set sensorgegevens tot een storing zal leiden, waardoor het een aanpasbare oplossing is. De hand is heel eenvoudig, maar kan met dezelfde strategie veel objecten oppakken.
Vervolg
Het grote voordeel van dit ontwerp is het bewegingsbereik dat de onderzoekers kunnen krijgen zonder actuatoren te gebruiken. Ze willen de hand zoveel mogelijk vereenvoudigen. Ze kunnen veel goede informatie en een hoge mate van controle krijgen zonder actuatoren. Als deze worden toegevoegd ontstaat complexer gedrag in een efficiënter pakket.
Een volledig aangedreven robothand levert, behalve de hoeveelheid energie die hij nodig heeft, ook een complex besturingsprobleem op. Het passieve ontwerp van de nu ontworpen hand, die een klein aantal sensoren gebruikt, is gemakkelijker te bedienen, biedt een breed bewegingsbereik en stroomlijnt het leerproces.
In de toekomst zou het systeem op verschillende manieren kunnen worden uitgebreid, bijvoorbeeld door computer vision toe te voegen of de robot te leren zijn omgeving te exploiteren. Daardoor kan hij een breder scala aan objecten begrijpen.
Foto: Bio-Inspired Robotics Laboratory, University of Cambridge