
05/12/2024
Door Ad Spijkers
Onderzoekers werden geïnspireerd door manta's door hun vermogen om bewegingen in het water beter te controleren.
Een team onderzoekers aan de North Carolina State University in Raleigh heeft het eigen record voor de snelste zwemmende zachte robot gebroken. Twee jaar geleden demonstreerden ze een zachte waterrobot die gemiddelde snelheden van 3,74 lichaamslengtes per seconde kon bereiken. Ze hebben dat ontwerp verbeterd. De nieuwe zachte robot is zuiniger met energie en bereikt een snelheid van 6,8 lichaamslengtes per seconde. Bovendien kon het vorige model alleen aan het wateroppervlak zwemmen. De nieuwe robot kan door de waterkolom heen en weer zwemmen.
Manta als inspiratie
De zachte robot heeft vinnen die de vorm hebben van die van een manta en is gemaakt van een materiaal dat stabiel is als de vinnen wijd gespreid zijn. De vinnen zijn bevestigd aan een flexibel siliconen lichaam dat een kamer bevat die vol met lucht kan worden gepompt. Door de luchtkamer op te blazen, worden de vinnen gedwongen te buigen – vergelijkbaar met de neerwaartse slag wanneer een manta met zijn vinnen flappert. Wanneer de lucht uit de kamer wordt gelaten, springen de vinnen spontaan terug in hun oorspronkelijke positie.
Door lucht in de kamer te pompen, wordt energie in het systeem geïntroduceerd. De vinnen willen terugkeren naar hun stabiele toestand, dus door de lucht los te laten. Hierdoor komt ook de energie in de vinnen vrij. Dat betekent dat maar één actuator voor de robot is hebben en dat zorgt voor een snellere actuatie.
Vloeistofdynamica
Het bestuderen van de vloeistofdynamica van manta's speelde ook een belangrijke rol bij het regelen van de verticale beweging van de zachte robot. De onderzoekers observeerden de zwembeweging van manta's. Ze konden dat gedrag nabootsen om te bepalen of de robot naar het oppervlak zwemt, naar beneden zwemt of zijn positie in de waterkolom behoudt. Wanneer manta's zwemmen, produceren ze twee waterstralen die hen vooruit bewegen. Manta's veranderen hun traject door hun zwembeweging te veranderen.
De onderzoekers hebben een soortgelijke techniek gebruikt om de verticale beweging van deze zwemmende robot te regelen. En ze werken nog steeds aan technieken die hen nauwkeurige controle geven over laterale bewegingen.
Vinnen en luchtkamer
Specifiek lieten simulaties en experimenten zien dat de neerwaartse straal die door de nieuwe robot wordt geproduceerd, krachtiger is dan de opwaartse straal. Als de robot snel met zijn vinnen slaat, zal hij omhoog komen. Maar door de actuatiefrequentie te vertragen, kan de robot lichtjes zinken tussen het klappen van zijn vinnen door. Hierdoor kan hij naar beneden duiken of op dezelfde diepte zwemmen.
Een andere factor die meespeelt, is dat deze robot wordt aandreven met perslucht. Wanneer de vinnen van de robot stilstaan, is de luchtkamer leeg waardoor het drijfvermogen van de robot afneemt. Wanneer de robot langzaam met zijn vinnen klapt, staan de vinnen vaker stil. Met andere woorden: hoe sneller de robot met zijn vinnen klapt, des langer is de luchtkamer vol, waardoor hij meer drijfvermogen heeft.
Ontwikkeling
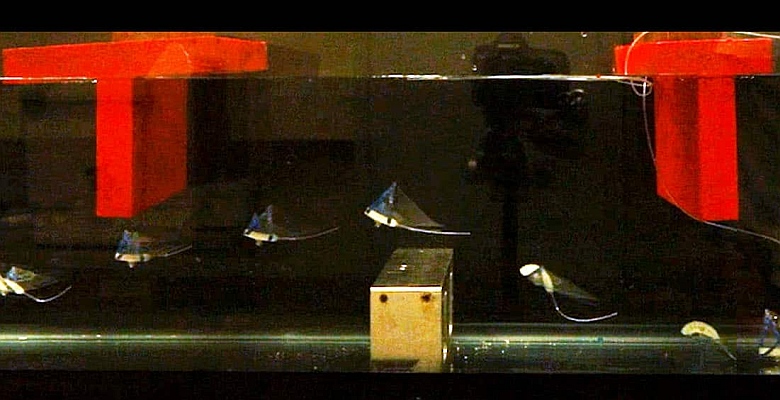
De onderzoekers hebben de functionaliteit van de zachte robot op twee verschillende manieren aangetoond. Ten eerste kon een iteratie van de robot navigeren door een parcours van obstakels die op het oppervlak en de vloer van een watertank waren opgesteld. Ten tweede toonden de onderzoekers aan dat de losgekoppelde robot een lading op het wateroppervlak kon vervoeren, inclusief zijn eigen lucht- en energiebron.
Het is een technisch ontwerp, maar de fundamentele concepten zijn vrij eenvoudig. Met slechts één actuatie-input kan de robot door een complexe verticale omgeving navigeren. De onderzoekers werken nu aan het verbeteren van laterale beweging en het verkennen van andere actuatiemodi, die de mogelijkheden van dit systeem aanzienlijk zullen verbeteren. Het doel is om dit te doen met een ontwerp dat die elegante eenvoud behoudt.
De wetenschappelijke publicatie vindt u hier.
Foto: Haitao Qing, NC State University