
19/04/2022
Door Ad Spijkers
Onderzoekers aan het Massachusetts Institute of Technology ontwikkelen een robotgrijper met rijke sensorische mogelijkheden.
Wie zich bezighoudt met de zogeheten zachte robotica denken in autonome apparaten die zijn samengesteld uit conforme onderdelen die zacht aanvoelen en meer lijken op menselijke vingers dan een industriële robot. In een recent project hebben onderzoekers aan het MIT een robotgrijper ontwikkeld met behulp van nieuwe 'GelSight Fin Ray' vingers. Deze zijn net als de menselijke hand soepel genoeg om objecten te hanteren. In tegenstelling tot andere grijpers hebben de onderzoekers hun grijper uitgerust met aanraaksensoren die de gevoeligheid van de menselijke huid kunnen evenaren of overschrijden.
Vin als basis
De vin is een populair item geworden in zachte robotica dankzij een ontdekking in 1997 door de Duitse bioloog Leif Kniese. Hij merkte op dat, wanneer hij met zijn vinger tegen de staart van een vis duwde, de vin zou buigen in de richting van de uitgeoefende kracht. De vin krulde om zijn vinger, in plaats van weg te kantelen. Het ontwerp is populair geworden omdat het zich passief kan aanpassen aan verschillende vormen en daardoor een verscheidenheid aan objecten kan grijpen. Maar het ontwerp mist tactiele gevoeligheid. Om verder te gaan, wilden de MIT-onderzoekers een rijke tactiele sensor in hun grijper opnemen.
De grijper bestaat uit twee flexibele vingers in de vorm van een vin. De passen zich aan aan de vorm van het object waarmee ze in contact komen. De vingers zelf zijn samengesteld uit flexibele plastic materialen gemaakt op een 3D-printer. De vingers die doorgaans worden gebruikt in zachte robotgrijpers hebben ondersteunende dwarsbalken die door de lengte van hun interieur lopen. De wetenschappers in Cambridge hebben het binnengebied uitgehold zodat ze ruimte konden creëren voor een camera en andere sensorische componenten.
Camera
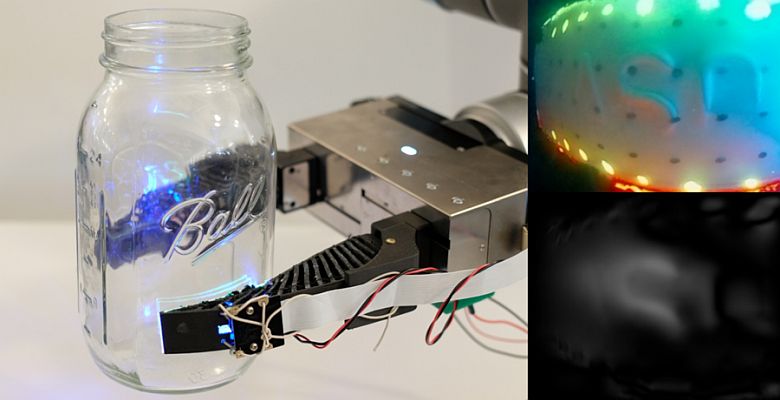
De camera is gemonteerd op een halfstijve achterkant aan het ene uiteinde van de uitgeholde holte, die zelf wordt verlicht door LED's. De camera wordt geconfronteerd met een laag 'sensorische' pads bestaande uit siliconengel ('GelSight') die op een dunne laag acrylmateriaal is gelijmd. De acrylplaat is op zijn beurt bevestigd aan het kunststof vingerstuk aan het andere uiteinde van de binnenholte.
Bij het aanraken van een object vouwt de vinger er naadloos omheen en versmelt als het ware met de contouren van het object. Door precies te bepalen hoe de siliconen- en acrylplaten tijdens deze interactie worden vervormd, kan de camera – samen met bijbehorende rekenalgoritmen – de algemene vorm van het object, de oppervlakteruwheid, de oriëntatie in de ruimte en de kracht beoordelen die wordt uitgeoefend door (en verleend aan) elke vinger.
De onderzoekers testten hun grijper in een experiment waarbij slechts een van de twee vingers werd 'gesensoriseerd'. Hun apparaat verwerkte met succes zaken als een mini-schroevendraaier, een kunststof aardbei, een tube acrylverf, een glazen pot en een wijnglas. Terwijl de grijper bijvoorbeeld de nep-aardbei vasthield, kon de interne sensor de 'zaden' op het oppervlak detecteren. De vingers grepen de tube verf zonder zo hard te knijpen dat ze hem openbraken en de inhoud morsten.
De tactiele detectie is gebaseerd op goedkope componenten: een camera, wat gel en sommige LED's. De onderzoekers hopen dat het met een technologie als GelSight mogelijk kan zijn om sensoren te bedenken die zowel praktisch als betaalbaar zijn.
Glazen pot
De GelSight-sensor kon zelfs letters op de glazen pot onderscheiden en deed dat op een nogal slimme manier. De algemene vorm van de pot werd eerst bepaald door te kijken hoe de acrylplaat werd gebogen wanneer deze eromheen werd gewikkeld. Dat patroon werd vervolgens door een computeralgoritme afgetrokken van de vervorming van het siliconenkussentje. Wat overbleef was de subtielere vervorming die alleen door de letters werd veroorzaakt.
Glazen objecten zijn door de breking van het licht een uitdaging voor op vision gebaseerde robots. Tactiele sensoren zijn immuun voor dergelijke optische ambiguïteit. Toen de grijper het wijnglas oppakte, kon hij de richting van de steel voelen en ervoor zorgen dat het glas recht omhoog wees voordat het langzaam werd neergelaten. Toen de basis het tafelblad raakte, voelde het gelkussen het contact. De juiste plaatsing vond plaats in zeven van de tien proeven; tijdens het filmen van het experiment (zie video) werd geen glas beschadigd.
Verder onderzoek
De onderzoekers voorzien veel mogelijke toepassingen voor hun GelSight Fin Ray, maar ze overwegen eerst enkele verbeteringen. Door de vinger uit te hollen om ruimte vrij te maken voor hun sensorische systeem introduceerden ze een structurele instabiliteit. De neiging om te draaien willen ze tegengaan door een beter ontwerp. Ze willen sensoren maken die compatibel zijn met zachte robots die door andere onderzoeksteams zijn bedacht. Ze willen ook een drievingerige grijper te ontwikkelen die nuttig kan zijn bij taken als het oppakken van stukjes fruit en het beoordelen van hun rijpheid.
Foto: MIT CSAIL