
28/12/2021
Door Ad Spijkers
Een machine learning programma past de bewegingen van de robot aan op basis van elektrische signalen uit de hersenen.
Twee onderzoeksgroepen aan de École Polytechnique Fédérale de Lausanne (EPFL) werkten samen om een machine learning programma voor robots te ontwikkelen. Het programma dat kan worden verbonden met een menselijk brein en gebruikt om een robot te besturen. Het machine learning programma past de bewegingen van de robot aan op basis van elektrische signalen uit de hersenen. De hoop is dat met deze uitvinding tetraplegische patiënten (bij wie alle vier ledematen verlamd zijn) meer dagelijkse activiteiten alleen kunnen uitvoeren.
Besturing door hersenen
Tetraplegische patiënten zijn gevangenen van hun eigen lichaam, niet in staat om te spreken of de minste beweging uit te voeren. Onderzoekers werken al jaren aan de ontwikkeling van systemen die deze patiënten kunnen helpen bepaalde taken zelf uit te voeren. Mensen met een dwarslaesie ervaren vaak permanente neurologische gebreken en ernstige motorische handicaps waardoor ze zelfs de eenvoudigste taken niet kunnen uitvoeren, zoals het grijpen van een object. Assistentie van robots zou deze mensen kunnen helpen een deel van hun verloren behendigheid terug te krijgen, omdat de robot taken in hun plaats kan uitvoeren.
Met behulp van het computerprogramma kan een robot worden bestuurd met behulp van elektrische signalen die worden uitgezonden door de hersenen van een patiënt. Er is geen spraakbesturing of aanraakfunctie nodig, ze kunnen de robot eenvoudig met hun gedachten bewegen.
Obstakels vermijden
Om hun systeem te ontwikkelen, begonnen de onderzoekers met een robotarm die enkele jaren geleden was ontwikkeld. Deze arm kan van rechts naar links heen en weer bewegen, objecten ervoor verplaatsen en objecten op zijn pad omzeilen. In het onderzoek is de robot geprogrammeerd om obstakels te vermijden. Maar de werenschappers hadden elke andere taak kunnen kiezen, zoals een glas water vullen of een voorwerp duwen of trekken.
De ingenieurs begonnen met het verbeteren van het mechanisme van de robot om obstakels te vermijden, zodat het nauwkeuriger zou zijn. In het begin koos de robot een pad dat te breed was voor sommige obstakels, de omweg te ver zou nemen en het obstakel te dichtbij zou houden. Aangezien het doel van de robot was om verlamde patiënten te helpen, moesten de ingenieurs een manier vinden waarop gebruikers ermee konden communiceren zonder dat ze hoefden te praten of te bewegen.
Algoritme
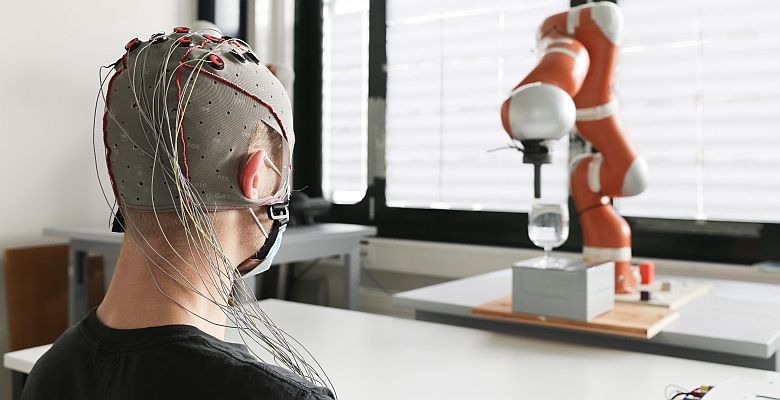
Dit hield in dat een algoritme werd ontwikkeld dat de bewegingen van de robot alleen op basis van de gedachten van een patiënt kon aanpassen. Het algoritme was verbonden met een hoofdkap die was uitgerust met elektroden voor het uitvoeren van elektro-encefalogram (EEG) -scans van de hersenactiviteit van een patiënt.
Om het systeem te gebruiken, hoeft de patiënt alleen maar naar de robot te kijken. Als de robot een verkeerde beweging maakt, zenden de hersenen van de patiënt een 'foutmelding' uit via een duidelijk herkenbaar signaal; het is alsof de patiënt zegt: "Nee, niet zo." De robot zal dan begrijpen dat wat hij doet verkeerd is, maar in eerste instantie niet precies weten waarom. Kwam het obstakel bijvoorbeeld te dicht bij of was de robot te ver weg van het object?
Om de robot te helpen het juiste antwoord te vinden, wordt de foutmelding ingevoerd in het algoritme. Dit gebruikt een omgekeerde leerbenadering om uit te zoeken wat de patiënt wil en welke acties de robot moet ondernemen. Dit gebeurt door middel van een trial-and-error proces waarbij de robot verschillende bewegingen uitprobeert om te zien welke de juiste is.
Het proces gaat vrij snel - meestal zijn er slechts drie tot vijf pogingen nodig voor de robot om de juiste reactie te vinden en de wensen van de patiënt uit te voeren. Het AI-programma van de robot kan snel leren, maar de patiënt moet vertellen wanneer het een fout maakt, zodat het zijn gedrag kan corrigeren.
Detectie
Het ontwikkelen van de detectietechnologie voor foutsignalen was een van de grootste technische uitdagingen waarmee de onderzoekers werden geconfronteerd. Bijzonder moeilijk in het onderzoek was het koppelen van de hersenactiviteit van een patiënt aan het besturingssysteem van de robot. Met andere woorden, hoe de hersensignalen van een patiënt te 'vertalen' in acties die door de robot werden uitgevoerd. Dat deden de ingenieurs door machine learning te gebruiken om een bepaald hersensignaal te koppelen aan een specifieke taak. Vervolgens associeerden ze de taken met individuele robotbesturingen, zodat de robot doet wat de patiënt voor ogen heeft.
De onderzoekers hopen uiteindelijk hun algoritme te gebruiken om rolstoelen of een robotarm te besturen. Maar voorlopig zijn er nog veel technische hindernissen te overwinnen. Rolstoelen vormen een geheel nieuwe reeks uitdagingen, aangezien zowel de patiënt als de robot in beweging zijn. Het team is ook van plan om hun algoritme te gebruiken met een robot die verschillende soorten signalen kan lezen. Ook moet hij gegevens die van de hersenen worden ontvangen, kunnen coördineren met die van visuele motorfuncties.
Foto: Alain Herzog, EPFL