
07/07/2021
Door Ad Spijkers
Zonder GPS raken autonome systemen (en zeker drones) gemakkelijk de weg kwijt. Dankzij een nieuw algoritme dat is ontwikkeld door het California Institute of Technology (CalTech) in Pasadena, kunnen autonome systemen herkennen waar ze zich bevinden door naar het terrein om hen heen te kijken. En voor het eerst werkt de technologie ongeacht veranderingen in dat terrein door seizoensinvloeden.
Het algemene proces, bekend als visuele terrein-relatieve navigatie (VTRN), werd voor het eerst ontwikkeld in de jaren zestig. Door nabijgelegen terrein te vergelijken met satellietbeelden met een hoge resolutie, kunnen autonome systemen zichzelf lokaliseren.
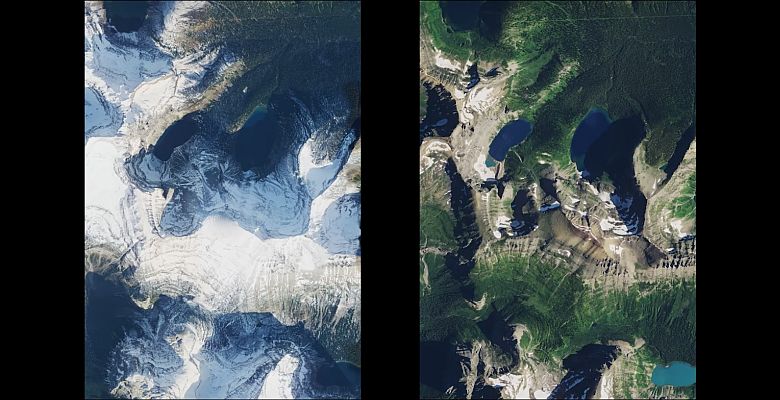
Maar om dat te laten werken, vereist de huidige generatie VTRN dat het terrein nauw aansluit bij de afbeeldingen in de database. Alles wat het terrein verandert of verduistert, zoals sneeuw of gevallen bladeren, zorgt ervoor dat de afbeeldingen niet overeenkomen en het systeem vervuilt. Tenzij er een database is van de landschapsbeelden onder alle denkbare omstandigheden, kunnen VTRN-systemen gemakkelijk in de war raken.
Om deze uitdaging door de seizoenen het hoofd te bieden, wendde een team van het Jet Propulsion Laboratory (JPL) van de NASA en CalTech zich tot deep learning en kunstmatige intelligentie (AI). De vuistregel is dat afbeeldingen van de satelliet en van het autonome voertuig een identieke inhoud moeten hebben om de huidige technieken te laten werken.
De verschillen die ze aankunnen, gaan over wat kan worden bereikt met een Instagram-filter dat de tinten van een afbeelding verandert. In de praktijk veranderen dingen echter drastisch afhankelijk van het seizoen, omdat afbeeldingen niet langer dezelfde objecten bevatten en niet direct te vergelijken zijn.
Self supervised learning
Het proces maakt gebruik van wat bekend staat als 'self supervised learning'. De meeste computer vision strategieën zijn afhankelijk van menselijke annotators die zorgvuldig grote datasets samenstellen om een algoritme te leren herkennen wat het ziet. Dit nieuwe algoritme echter laat het algoritme zichzelf leren. AI zoekt naar patronen in afbeeldingen door details en eigenschappen te herkennen die waarschijnlijk door mensen zouden worden gemist.
Het aanvullen van de huidige generatie VTRN met het nieuwe systeem levert een nauwkeurigere lokalisatie op. In één experiment probeerden de onderzoekers beelden van zomergebladerte te lokaliseren tegen beelden zonder zomergebladerte met behulp van een op correlatie gebaseerde VTRN-techniek. Ze ontdekten dat 50% van de pogingen resulteerde in navigatiefouten.
Het invoegen van het nieuwe algoritme in VTRN gaf veel betere resultaten: 92% van de pogingen kwam correct overeen. De resterende 8 procent kon vooraf al als problematisch worden geïdentificeerd en vervolgens gemakkelijk worden beheerd met behulp van andere gevestigde navigatietechnieken.
Patroonherkenning
Computers kunnen onduidelijke patronen vinden die onze ogen niet kunnen zien. Ze kunnen zelfs de kleinste trend oppikken. Behalve als hulpprogramma voor autonome voertuigen op aarde heeft het systeem ook toepassingen voor ruimtemissies. Het systeem voor binnenkomen, dalen en landen tijdens de Mars 2020 Perseverance Rover missie bijvoorbeeld gebruikte VTRN om op de rode planeet te landen. Dit gebeurde in de Jezero-krater, die eerder als te gevaarlijk werd beschouwd voor een veilige binnenkomst.
Met verkenners zoals de Perseverance is een zekere mate van autonoom rijden noodzakelijk. Het kan namelijk twintig minuten duren om signalen tussen de aarde en Mars uit te wisselen, en er is geen GPS op Mars. De poolgebieden van Mars hebben net als de andere intense seizoensveranderingen met omstandigheden die vergelijkbaar zijn met die op aarde. Het nieuwe systeem zou een betere navigatie mogelijk kunnen maken om wetenschappelijke doelen te ondersteunen, waaronder het zoeken naar water.
De onderzoekers willen de technologie uitbreiden om ook rekening te houden met veranderingen in het weer: mist, regen, sneeuw, enzovoort. Als dat lukt, kan hun werk helpen bij het verbeteren van navigatiesystemen voor auto's zonder bestuurder.
Foto: still video CalTech