
04/03/2021
Door Ad Spijkers
Een nieuw type besturingssysteem kan het takenpakket van robots uitbreiden en veiligere interacties met mensen mogelijk maken. Onderzoekers aan het Massachusetts Institute of Technology hebben met behulp van computersimulaties een concept ontwikkeld voor een robot met een zacht lichaam dat op verzoek stijf kan worden.
Bij een robot denkt u waarschijnlijk vooral aan een machine met een stijve, metalen buitenkant. Hoewel robots met harde lichamen gebruikelijk zijn, zijn ze niet altijd ideaal. Robots met een zacht lichaam kunnen zich misschien beter aanpassen aan veranderende omgevingen en veiliger samenwerken met mensen. Robotontwerpers moeten beslissen of ze voor een bepaalde taak een robot met een hard of zacht lichaam ontwerpen. Maar die afweging is misschien niet langer nodig.
De aanpak zou een nieuwe generatie robots mogelijk kunnen maken die de kracht en precisie van stijve robots combineren met de flexibiliteit en veiligheid van zachte robots.
Het principe
Robotici hebben geëxperimenteerd met talloze mechanismen om zachte robots te bedienen, zoals het opblazen van ballonachtige kamers in de arm van een robot of het vastgrijpen van objecten met vacuümverpakt koffiedik. Een belangrijke onopgeloste uitdaging voor zachte robotica is echter de besturing: hoe stuur je de actuatoren van de robot aan om een bepaald doel te bereiken?
Tot voor kort werden de meeste zachte robots met de hand bestuurd, maar in 2017 stelden MIT-onderzoekers voor dat een algoritme de teugels in handen zou kunnen nemen. Met behulp van een simulatie om een door een kabel aangedreven zachte robot te helpen besturen, kozen ze een gewenste positie voor de robot. Ze lieten een computer berekenen hoe hard er aan elk van de kabels moest worden getrokken om daar te komen.
In ons lichaam gebeurt iets soortgelijks telkens als we naar iets reiken: een gewenste positie voor onze hand wordt vertaald in samentrekkingen van de spieren in onze arm. Wie alleen de biceps aanspant, kan zijn elleboog tot op zekere hoogte buigen. Maar door biceps en triceps tegelijk aan te spannen, is de arm stijf in die positie te houden.
Trekken aan kabels
De vraag van de onderzoekers is nu: "Als ik op de juiste manier aan de kabels trek, kan ik de robot dan stijf laten bewegen?" In een computersimulatie blijkt dat het kan. Simpel gezegd: je kunt stijfheid krijgen door aan beide kanten van iets te trekken. Dus pasten de onderzoekers hetzelfde principe toe op hun robots.
De methode maakt gebruik van meerdere kabels in een robot. Sommige worden gebruikt om het lichaam te draaien en te keren, terwijl andere worden gebruikt als tegenwicht om de stijfheid van de robot aan te passen. Het is een intuïtieve manier hoe een zachte robot te besturen. Het idee van on-demand stijfheid wordt gewoon gecodeerd in een computer.
Simulatie
Op de computer zijn beweging en aanpassing van stijfheid in robots met verschillende vormen gesimuleerd. De onderzoekers testten hoe goed de robots in verstijfde toestand weerstand boden tegen verplaatsing wanneer ze werden geduwd. Over het algemeen bleven de robots stijf als bedoeld, hoewel ze niet vanuit alle hoeken even bestendig waren.
Momenteel bouwen de wetenschappers een prototype robot om het besturingssysteem voor 'rigidity on demand' te testen. Ze hopen de technologie op een dag ook buiten het lab te kunnen toepassen. Interactie met mensen is zeker een visie voor zachte robotica. Daarbij valt te denken aan toepassingen in de zorg, waar de zachtheid van een robot de veiligheid zou kunnen verhogen. Het vermogen om stijf te worden zou het mogelijk kunnen maken om te tillen wanneer dat nodig is.
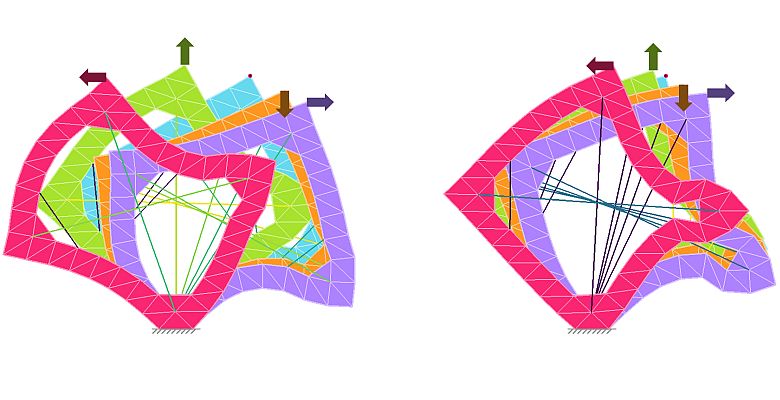
De illustratie toont een gesimuleerde zachte robot die wordt bestuurd om een positie te bereiken (rode stip) terwijl hij zacht (links) of stijf (rechts) handelt. Ill: MIT Computer Science and Artificial Intelligence Laboratory (CSAIL)